Hemos visto en innumerables ocasiones cómo la robótica se ha inspirado poderosamente en la naturaleza para adaptar sus creaciones a entornos complicados. Estas innovaciones son escasas en España, pero sirven como base para que la tecnología esté en constante adaptación, especialmente en el mundo de la robótica aplicada a entornos naturales. Es lo que ocurre con este calamar robot. Es cierto que robots basados en animales reales hay bastantes, pero este en concreto es cuanto menos curioso. Este «Squidbot» inspirado, obviamente, en un calamar ha sido desarrollado por ingenieros de la Universidad de California en San Diego, Estados Unidos.
Esta pieza de ingeniería tiene rasgos muy distintivos, como su capacidad de propulsión mediante chorros de agua mediante un complejo sistema de mecanismos que imitan al de su congénere animal. https://youtu.be/v-UMDnSB8k0
Este dispositivo usa en su cuerpo una combinación de materiales ligeros y rígidos para impulsarse a través del agua. Está diseñado de tal forma que es capaz de almacenar energía elástica en su piel y en el interior de su conjunto de costillas flexibles. Estas están ancladas a un par de placas circulares en cada extremo del cuerpo; una se encarga de aspirar el agua a través de una boquilla y la otra la expulsa cuando el cuerpo se contrae. Así, la propulsión se realiza mediante chorros de agua, como un calamar natural. De esta forma, el robot es capaz de llevar su fuente de energía en el interior de su cuerpo, lo que evita que tenga que estar atado a una externa. Michael T. Tolley, profesor del Departamento de Ingeniería Mecánica y Aeroespacial de la UC San Diego, asegura que este es el primer robot capaz de esto. «Este es el primer robot sin ataduras que puede generar pulsos de chorro para una locomoción rápida como el calamar y puede lograr estos impulsos cambiando la forma de su cuerpo, lo que mejora la eficiencia de la natación». Multitud de usos No es la única ventaja; el diseño permite que su segunda placa se pueda cargar mediante sensores o cámaras para realizar tareas de monitorización submarina. Estos robots pueden tener multitud de usos en proyectos de investigación medioambiental como la conservación de entornos naturales marinos, ya que al tener cuerpos blandos no dañarían ni estos ambientes ni a los animales que viven en ellos. En las pruebas, el Squidbot consiguió impulsarse a una velocidad de 32 centímetros por segundo o 0.8 kilómetros por hora, lo que supone según sus desarrolladore todo un logro respecto a otros robots de cuerpo blando. Además, es manejable ya que el equipo demostró que cambiando la orientación de la boquilla podían dirigir al robot.
Especialistas de Intel, en colaboración con colegas de la Universidad de Cornell, de Nueva York, dieron a conocer un chip que imita la capacidad olfativa de humanos y animales. Por eso señalan que se trata de un desarrollo de ingeniería neuromórfica, es decir, que emula estructura neurobiológicas de los seres vivos. “Estamos desarrollando algoritmos neuronales que imitan los procesos que se activan en nuestro cerebro al oler algo”, indicó Nabil Imam, del Laboratorio de Computación Neuromórfica de Intel, y comentó que esta investigación se encuentra a medio camino entre la neurociencia y la inteligencia artificial.
Según explicaron los científicos en un artículo publicado en la revista Nature, su ingenio consiguió “una precisión de reconocimiento superior en comparación con los métodos convencionales de vanguardia”. Incluso demostró una eficiencia muy superior a la de un sistema de aprendizaje profundo que necesita 3.000 veces más muestras para lograr la misma exactitud en la clasificación de olores.
Estamos desarrollando algoritmos neuronales que imitan los procesos que se activan en nuestro cerebro al oler algo”, dijo uno de los investigadores involucrados en este desarrollo. En este caso, la “nariz robótica” realizó sus identificaciones eficazmente con una sola muestra. En el detrás de escena opera un algoritmo que imita la arquitectura y funcionamiento de los circuitos olfativos cerebrales. En las pruebas de laboratorio, este método logró reconocer 10 sustancias químicas peligrosas. Las aplicaciones del invento El chip es especialmente hábil para reconocer sustancias químicas peligrosas, incluso con interferencias o elementos bloqueando. Por caso, puede identificar olores de elementos que se utilizan para la fabricación de explosivos, narcóticos y polímeros. Además de su uso por parte de autoridades en aeropuertos y/o fuerzas de seguridad, los científicos de Intel señalaron que estos sistemas olfativos electrónicos, que además son altamente portátiles, podrían ser utilizados por médicos para diagnosticar enfermedades. También para detectar con eficacia la presencia de humo y monóxido de carbono en los hogares.
Tal como notan en Technology Review, el chip aún es un prototipo, pero una vez maduro tendrá interesantes aplicaciones. Los expertos involucrados en este desarrollo hablan de una tecnología con potencial para beneficiar a múltiples sectores. “Entender cómo los circuitos neuronales del cerebro resuelven estos complejos problemas computacionales proveerá importantes pistas para diseñar una eficiente y robusta inteligencia mecánica”, concluyó Imam.
Por primera vez, investigadores del MIT han logrado diseñar sensores de piel que confieren conciencia sobre el entorno a los robots blandos.
Este hallazgo es importante porque en el campo de los robots blandos otorgar control autónomo es una tarea compleja puesto que éstos pueden moverse en un número prácticamente infinito de direcciones en cualquier momento dado.
Piel «sensorizada»
No es práctico para los robots blandos en aplicaciones del mundo real el empleo del mismo procedimiento que se usa con los robots convencionales, esto es, grandes sistemas de múltiples cámaras de captura de movimiento que proporcionan a los robots referencias sobre el movimiento y las posiciones en 3D.
Resulta mucho más eficaz un sistema de sensores blandos que cubren el cuerpo de un robot para proporcionar «propiocepción», lo que significa conciencia del movimiento y la posición de su cuerpo, tal y como han demostrado estos investigadores del MIT en un estudio publicado en la revista IEEE Robotics and Automation Letters.
Esa retroalimentación se encuentra con un nuevo modelo de aprendizaje profundo que se filtra a través del ruido y captura señales claras para estimar la configuración 3D del robot, lo que facilitará el hacer extremidades artificiales que puedan manejar y manipular objetos con mayor destreza en el entorno.
Según Ryan Truby, primer autor del estudio en el Laboratorio de Ciencias de la Computación y Artificial del MIT (CSAIL):
Estamos sensorizando robots blandos para obtener retroalimentación para el control de los sensores, no de los sistemas de visión, utilizando un método muy fácil y rápido para la fabricación. Queremos usar estos brazos robóticos blandos, por ejemplo, para orientarnos y controlarnos automáticamente, para recoger cosas e interactuar con el mundo. Este es un primer paso hacia ese tipo de control automatizado más sofisticado.
En los experimentos, los investigadores hicieron que un brazo girara y se extendiera en configuraciones aleatorias durante aproximadamente una hora y media. Utilizaron el sistema tradicional de captura de movimiento sobre el terreno. En el entrenamiento, el modelo analizó los datos de sus sensores para predecir una configuración y comparó sus predicciones con los datos de del terreno que se recopilaban simultáneamente.
Los científicos de ETH Zürich han desarrollado un mecanismo para que los robots levanten cosas sin tocarlas. Parece que los robots usan ‘La Fuerza’, pero es solo levitación acústica, una tecnología que usa ultrasonido para suspender objetos en el aire. A diferencia de las manosrobóticas convencionales, este nuevo agarre, se puede utilizar para manipular objetos frágiles que deben ser levantados sin ser tocados, desarrollado por Marcel Schuck, miembro de ETH Zürich Pioneer, la mano robótica no tiene dedos, pinzas ni ningún otro elemento táctil, al final del brazo, se encuentran dos hemisferios blancos. Si bien la tecnología se demostró por primera vez en la década de 1940, sólo experimentó un desarrollo significativo en el siglo pasado, cuando los científicos comenzaron a desarrollar métodos para manipular pequeños objetos biológicos como células individuales y objetos más grandes.
Sin embargo, la invención de Schuck es una de las primeras aplicaciones prácticas que puede salir del laboratorio de ingeniería y convertirse en aplicaciones reales en entornos como salas de cirugía, laboratorios médicos o instalaciones de fabricación con piezas pequeñas que pueden dañarse o contaminarse fácilmente con el tacto. Otro prototipo de agarre robótico desarrollado por Schuck Según Schuck, “las ruedas dentadas que se utilizan en la relojería se recubren primero con lubricante, y luego se mide el espesor de esta capa de lubricante, ya que incluso el toque más leve podría dañar la delgada película de lubricante ”. Por lo tanto, esta será una aplicación perfecta, lo mismo se aplica a la manipulación de semiconductores en vueltas, en lugar de usar manos o robots, esta máquina permitirá una manipulación 100% limpia y suave del frágil silicio. Las ventajas de los robots que pueden agarrar cosas sin tocarlas van más allá de los objetos frágiles u objetos que no pueden contaminarse, el software que alimenta esta pinza puede tomar objetos de cualquier forma analizando el contorno en 3D de los objetos, mientras que en la robótica táctil tradicional, necesita pinzas especialmente diseñadas para adaptarse a la forma del objeto, pero en este caso, «la pinza acústica elimina la necesidad de un extenso conjunto de pinzas costosas de alta precisión», explica el Instituto Suizo de Tecnología.
Si juntamos medusas voladoras con robots, este sería el resultado de un grupo de científicos que pretenden dar un paso más en la autonomía de este tipo de robots. Un grupo de científicos ha construido una nueva máquina voladora que «funciona» como las medusas que conocemos en el océano, y lo bueno de todo es que pesa menos de 30 g. Este invento, hecho de fibra de carbono, va alternando sus pares de alas en forma de pétalos de flores para poder volar.
En el vídeo que acompaña a la noticia puedes ver a esta especie de robot volador medusa realizar el vuelo de manera un poco inestable, aunque sus creadores sostienen que a pesar de ello acaba siendo más estable que otros robots basados en aves o en insectos. Según comentan sus creadores, el robot medusa puede flotar y cambiar de dirección ajustando la velocidad y el tamaño de las alas. De momento el prototipo presentado aún precisa de estar conectado a una fuente eléctrica para funcionar, aunque el plan es hacerlo más autónomo basándose en la energía de una batería.
Este tipo de inventos pueden ser útiles para la vigilancia militar o para monitorear el tráfico de la calidad del aire, aunque resultará un poco extraño ver una medusa volar sobre nuestras cabezas.
Investigadores de IBM han logrado crear una lengua robótica
que es capaz de probar cualquier sustancia líquida e identificar de qué
está compuesta y si contiene sustancias químicas peligrosas. Todo ello,
en tan solo un minuto.
En la antigüedad, cuando un rey o una reina recibía un regalo en
forma de comida, existían los llamados catadores de comidas que tenían
que probarlo antes por si se trataba de veneno o de alguna sustancia
química peligrosa. Quizás no llegando a esos extremos, pero IBM ha
conseguido crear una especie de lengua electrónica que es capaz de analizar líquidos de una manera muy sencilla.
Esto no solo podría valer para saber si un líquido es peligroso, sino
también para conocer los ingredientes con los que ha sido hecha una
bebida en particular (adiós a ese ingrediente secreto de una conocida
marca), ver la calidad del agua o incluso la antigüedad de un vino.
De nombre Hypertaste, se parece a una rodaja de
naranja o de limón que se posiciona sobre un recipiente en forma de
vaso. La parte inferior que toma contacto con el líquido está compuesta
de una serie de sensores electroquímicos que pueden detectar la
presencia de combinaciones de moléculas.
Posteriormente estos sensores reaccionan a esta molécula produciendo
señales eléctricas medibles que reproducen una especie de huella digital
del líquido. Antes ya existía una lengua electrónica para la cerveza, pero ahora se lleva más lejos.
Una vez con esa huella digital, se transmite a un dispositivo móvil, y
al mismo tiempo envía la información a un servidor en la nube. Allí el
servidor en la nube compara dicha huella digital con otras huellas de
líquidos conocidos y se envía la coincidencia más cercana al dispositivo
móvil.
El proceso, aunque parezca largo no es así, dado que IBM Research asegura que toma menos de un minuto.
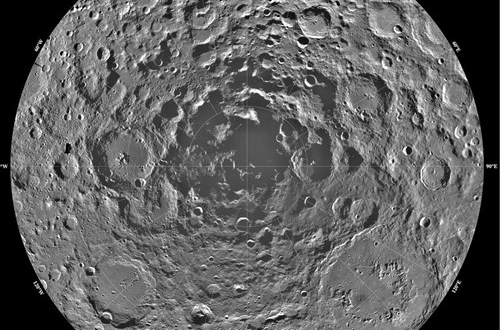
Nuevas misiones del Programa de Exploración Lunar de China contemplan el despliegue de una avanzadilla robótica en el polo sur del satélite terreste a finales de la próxima década.
Después de Chang’e 5, que se lanzará en 2020 para traer muestras a la
Tierra desde una latitud 18 grados al norte del ecuador lunar, el foco
de las misiones lunares chinas se desplazará hacia el polo sur.
Chang’e 6 tiene como objetivo devolver muestras de la región, y
Chang’e 7 estudiará el medio ambiente y los recursos del polo sur,
explicaron los investigadores de la Academia de Ciencias de China en una
descripción general de los planes lunares de China publicada en la
revista Science. Ninguna de las dos misiones tiene una fecha de
lanzamiento fija hasta el momento, pero ambas comenzarán en el 2020. Así
lo hará Chang’e 8, cuyo destino no está claro en este momento.
Estas tres misiones representan la siguiente fase de los planes
lunares de China, y darán como resultado un puesto de investigación
polar antes de 2030, si todo va según lo planeado, informa Space.com.
«A través de estas misiones, se construirá un prototipo de estación
de investigación científica robótica en la Luna. Los objetivos de
exploración cambiarán el enfoque del desarrollo de la tecnología
espacial a la ciencia espacial y las aplicaciones espaciales»,
escribieron Chunlai Li y sus colegas en el artículo de Science.
«La Estación de Investigación Científica Lunar, con la capacidad de
operaciones de larga duración y control operacional inteligente, se
diseñará para llevar a cabo la verificación técnica y la validación del
desarrollo de recursos y la tecnología de utilización, explorar
perspectivas para aplicaciones, mejorar la capacidad de la ciencia y
recursos lunares», agregaron los investigadores, y sentaron las bases
para la construcción y operación de futuras Estaciones de Investigación
Lunar, así como para la exploración de la luna por humanos».
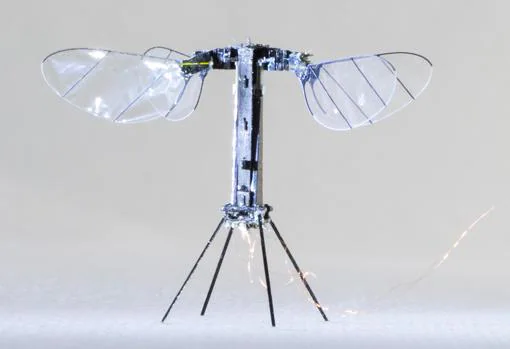
Lleva casi dos décadas ideándose en el Laboratorio de Microrrobots de la Universidad de Harvard y los ingenieros están seguros de que es el futuro de los rescates o de la investigación científica. El robot mosca o Robobee X-Wind (cuya traducción literal sería «roboabeja») acaba de dar un paso más allá en su diseño y ya es capaz de volar de forma autónoma y sin cables. El avance se publica esta semana en la revista «Nature».
La estudiante de posgrado Elizabeth Farrell Helbling y su compañero Noah T. Jafferis grabaron
el momento en el que Robobee se alzaba en su primer vuelo en solitario,
dirigiéndose hacia la luz gracias a sus fotorreceptores, que son los
que canalizan la energía hacia sus alas, con inspiración en las
libélulas y otros insectos voladores.
«Tres, dos, uno, ¡adelante!», se puede escuchar en la grabación de lo que hasta la fecha es el vehículo más liviano que ha conseguido realizar un vuelo autónomo. Los cables que se ven conectados al robot son en realidad el arnés de seguridad que evita que Robobee se estrelle con el suelo, ya que de momento no puede ser controlado y solo viaja mecánicamente hacia el foco de luz. Aunque parezca algo relativamente sencillo, hay que pensar que se trata de un robot de apenas 250 miligramos de peso y 3,4 centímetros de envergadura.
La proeza de la escala milimétrica
«Este es el resultado de varias décadas de fabricación», afirma Robert Wood,
profesor de Ingeniería y Ciencias Aplicadas de Charles River en SEAS,
miembro de la Facultad Central del Instituto Wyss e investigador
principal del proyecto Robobee. «Compensar masa y potencia se vuelve un problema en escalas pequeñas,
donde el vuelo es inherentemente ineficiente. No ayuda que incluso las
baterías más pequeñas disponibles en el mercado pesen mucho más que el
robot. Se han tenido que desarrollar nuevas estrategias para enfrentar
este desafío, aumentando la eficiencia de Robobee, creando circuitos de potencia extremadamente ligeros e integrando células solares de alta eficiencia», explica.
Para
lograr un vuelo autónomo, el nuevo diseño de Robobee incluyó un nuevo
par de alas nuevas, lo que ha permitido a los investigadores cortar el
cable de alimentación, que ha mantenido atado al robot durante casi una
década. Además, se han conectado nuevas celdas solares y un panel
electrónico. «El cambio de dos a cuatro alas, junto con cambios menos
visibles en el actuador y la relación de transmisión, hizo que el robot
fuera más eficiente, le dio mayor autonomía y nos permitió colocar todo
lo que necesitamos a bordo sin usar más potencia», afirma Jafferis.
Robobee
tiene cuatro alas compuestas de un fino poliester reforzado con fibra
de carbono y sus «músculos» son en realidad cristales piezoeléctricos
que se contraen o se estiran según el voltaje que se les aplica. – Eliza Grinell, Harvard Microrobotics Laboratory
Lejos de salir al exterior
Las células solares, las más pequeñas disponibles comercialmente, pesan 10 miligramos cada una y obtienen 0.76 milivatios por miligramo de energía cuando
el Sol irradia su máxima intensidad. El Robobee X-Wing necesita el
triple de energía solar para volar, por lo que, por ahora, el vuelo al
aire libre está fuera de su alcance. En cambio, los investigadores
simulan ese nivel de luz solar en el laboratorio con luces halógenas.
Las
células solares están conectadas a un panel electrónico debajo de la
«mosca», que convierte las señales de bajo voltaje de la matriz solar en
señales de alto voltaje necesarias para controlar los actuadores. Las
células solares se encuentran a unos tres centímetros por encima de las
alas, para evitar interferencias.
En total, el vehículo final, con las células solares y la electrónica, pesa 259 miligramos (aproximadamente un cuarto de un clip para reunir papeles) y utiliza unos 120 milivatios de potencia, que es menos de lo que se necesitaría para encender una única bombilla de las luces del árbol de Navidad de led.
Aún así los investigadores señalan que queda mucho camino por delante y sus próximos obletivos es agregar los controles para que Robobee pueda ser manejado de forma externa.
«A lo largo de la vida de este proyecto, hemos desarrollado
secuencialmente soluciones para problemas difíciles, como construir
dispositivos complejos a escalas milimétricas, crear músculos
artificiales de gran escala en milímetros, diseños bioinspirados y
sensores novedosos. Ahora que están surgiendo soluciones en la energía,
el siguiente paso es el control a bordo. Más allá de estos robots,
estamos entusiasmados de que estas tecnologías subyacentes encuentren
aplicaciones en otras áreas, como dispositivos quirúrgicos mínimamente
invasivos, sensores portátiles, robots de asistencia y dispositivos de
comunicación háptica, por nombrar unos cuantos», concluye Wood.
Desarrollado en la Universidad Ben-Gurion del Negev por el profesor de Ingeniería Mecánica David Zarrouk y su estudiante graduado, Nir Meiri, el FSTAR ajusta su ancho para arrastrarse o correr sobre superficies planas, trepar por grandes obstáculos y subir paredes muy separadas, o atravesar un túnel, tubería o espacios angostos.
Además, puede correr en el suelo a una velocidad de hasta 2,6 metros por segundo, tal y como explica Zarrouk:
Planeamos desarrollar versiones más grandes y más pequeñas para expandir esta familia de robots extensos para diferentes aplicaciones, así como algoritmos que ayudarán a explotar la velocidad y el costo de transporte de estos robots voladores / conductores.
Un equipo de investigadores de la Universidad de Duisburg-Essen, en Alemania, ha descubierto que los humanos pueden ser susceptibles a la manipulación emocional de un robot.
En su estudio, publicado PLOS ONE, el grupo describe experimentos que llevaron a cabo con voluntarios humanos a fin de que interactuaran.
Emoción robot
El nuevo estudio involucró a 89 voluntarios a quienes se les pidió interactuar con un robot Nao bajo la apariencia de ayudarlo a ser más inteligente. Al final de la interacción, un investigador le solicitó al voluntario que apagara el robot solo para que el robot les ruegue, por favor, que no lo haga.
Además de las solicitudes de voz, el robot también mostró acciones corporales para reforzar su solicitud. Algunos voluntarios sirvieron como controles: se les pidió que apagaran el robot pero no mostraron piedad del robot.
Los investigadores señalaron que, en última instancia, 43 de los voluntarios se enfrentaron a la decisión de cumplir con la solicitud de los investigadores o la del robot.
Señalaron que 13 voluntarios eligieron prestar atención a los deseos del robot y que todos los demás tardaron más en apagar el robot que los que estaban en el grupo de control.
Sugieren que sus hallazgos indican que los humanos tienen una tendencia tan fuerte a antropomorfizar los robots que podemos ser presa de la manipulación emocional. Señalan que también encontraron que el tipo y la duración de la socialización antes de que se les pidiera que apagaran el robot no parecían tener ningún impacto con respecto a la decisión tomada por los voluntarios.
Imagen | peyri